Modelos y estándares de datos geoespaciales¶
Trabajo previo¶
Lecturas¶
Lovelace, R., Nowosad, J., & Münchow, J. (2019). Geocomputation with R. CRC Press, Taylor and Francis Group, CRC Press is an imprint of theTaylor and Francis Group, an informa Buisness, A Chapman & Hall Book. https://geocompr.robinlovelace.net/ (Capítulo 2)
Olaya, V. (2020). Sistemas de Información Geográfica. https://volaya.github.io/libro-sig/ (Parte 2, capítulo “Modelos para la información geográfica”)
Resumen¶
Se introducen los modelos vectorial y raster, así como el estándar Simple Features para datos vectoriales.
Modelos de datos¶
Se utilizan dos modelos para la representación de datos geoespaciales: el vectorial y el raster.
El modelo vectorial¶
El modelo vectorial de datos está basado en puntos localizados en un sistema de referencia de coordenadas (CRS; en inglés, Coordinate Reference System). Los puntos individuales pueden representar objetos independientes (ej. un poste eléctrico, una cabina telefónica) o pueden también agruparse para formar geometrías más complejas como líneas o polígonos. Por lo general, los puntos tienen solo dos dimensiones (x, y), a las que se les puede agregar una tercera dimensión z, usualmente correspondiente a la altitud sobre el nivel del mar.
El estándar Simple Features¶
Simple Features (o Simple Feature Access) es un estándar abierto de la Organización Internacional de Estandarización (ISO) y del Open Geospatial Consortium (OGC) que especifica un modelo común de almacenamiento y acceso para geometrías de dos dimensiones (líneas, polígonos, multilíneas, multipolígonos, etc.). El estándar es implementado por muchas bibliotecas y bases de datos geoespaciales como GDAL, Fiona (Python), Shapely (Python), sf (R), PostgreSQL/PostGIS, SQLite/SpatiaLite, Oracle Spatial y Microsoft SQL Server, entre muchas otras.
La especificación define 17 tipos de geometrías, de las cuales siete son las más comúnmente utilizadas. Estas últimas se muestran en la Fig. 18.
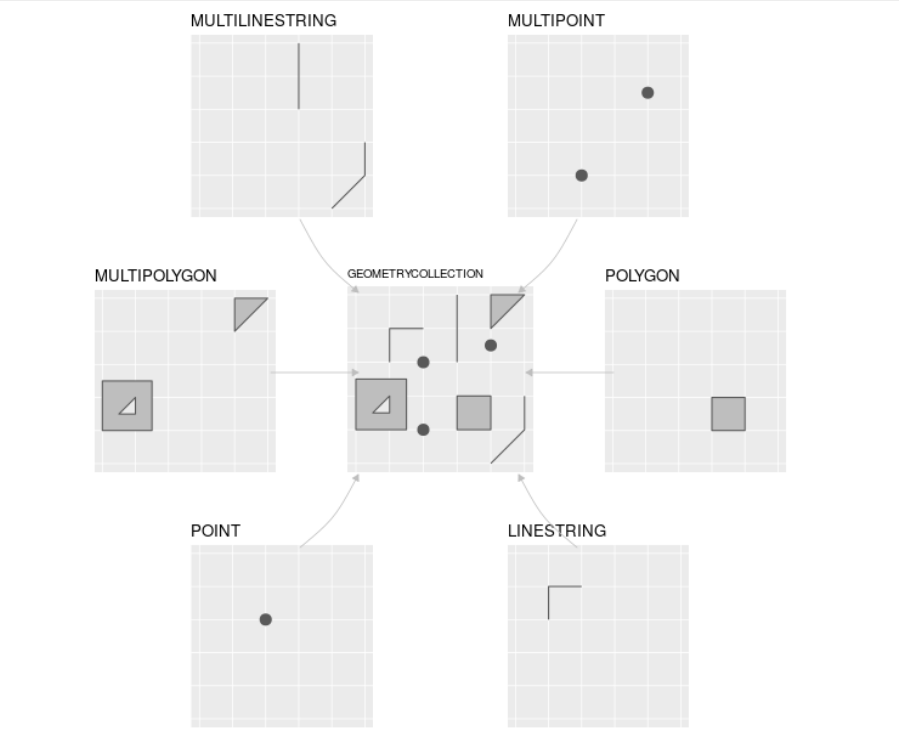
Fig. 18 Tipos de geometrías de Simple Features más usadas. Imagen de Robin Lovelace et al..¶
El modelo raster¶
El modelo de datos raster usualmente consiste de un encabezado y de una matriz con celdas (también llamadas pixeles) de un mismo tamaño. El encabezado define el CRS, la extensión y el punto de origen de una capa raster. Por lo general, el origen se ubica en la esquina inferior izquierda o en la esquina superior izquierda de la matriz. La extensión se define mediante el número de filas, el número de columnas y el tamaño (resolución) de la celda.
Cada celda tiene una identificación (ID) y almacena un único valor, el cual puede ser numérico o categórico, como se muestra en la Fig. 19.
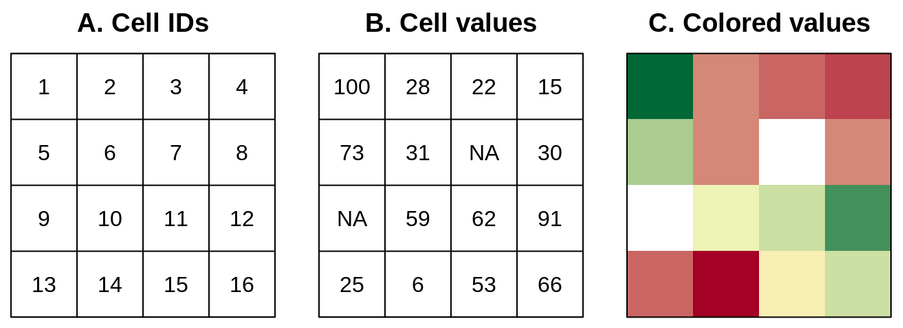
Fig. 19 El modelo raster: (A) ID de las celdas, (B) valores de las celdas, (C) mapa raster de colores. Imagen de Robin Lovelace et al..¶
A diferencia del modelo vectorial, el modelo raster no necesita almacenar todas las coordenadas de cada geometría (i.e. las esquinas de las celdas), debido a que la ubicación de cada celda puede calcularse a partir de la información contenida en el encabezado. Esta simplicidad, en conjunto con el álgebra de mapas, permiten que el procesamiento de datos raster sea mucho más eficiente que el procesamiento de datos vectoriales. Por otra parte, el modelo vectorial es mucho más flexible en cuanto a las posibilidades de representación de geometrías y almacenamiento de valores, por medio de múltiples elementos de datos.
Los mapas raster generalmente almacenan fenómenos continuos como elevación, precipitación, temperatura, densidad de población y datos espectrales. También es posible representar mediante raster datos discretos, tales como tipos de suelo o clases de cobertura de la tierra, como se muestra en la Fig. 20.
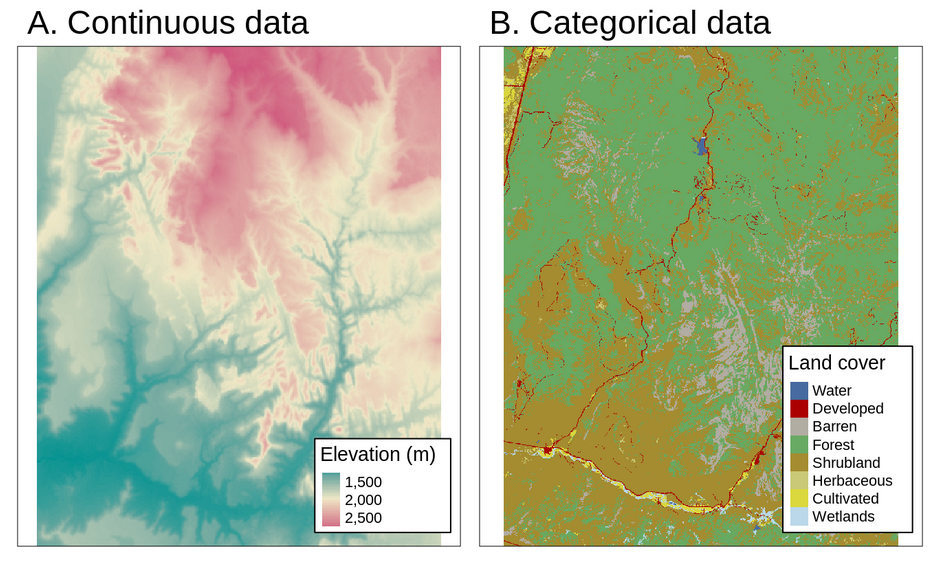
Fig. 20 Ejemplos de mapas raster continuos y categóricos. Imagen de Robin Lovelace et al..¶